Thank you for your visit! I am currently an Assistant Professor of CS at Harvard University. Previously, I was an Assistant Professor at Arizona State University (ASU) in the CS department of the School of Computing, Informatics, and Decision Systems Engineering (CIDSE). At Harvard, I direct the REACT Lab (Robotics, Embedded Autonomy, and Communication Theory Lab). My goal is to develop and use technologies for improving robot-robot and human-robot teamwork. The key to effective coordination is information exchange. So my research looks at ways that use wireless signals to improve communication in multi-robot teams, enhance situational awareness, and secure core multi-agent algorithms. My work has also studied the potential of using brain signals for information exchange in human-robot teams. I am interested in applications of my research to positioning systems indoors, human-robot collaboration, and making robot-robot teams robust and secure against cybersecurity threats.
Thank you for your visit! I am currently an Assistant Professor of CS at Harvard University. Previously, I was an Assistant Professor at Arizona State University (ASU) in the CS department of the School of Computing, Informatics, and Decision Systems Engineering (CIDSE). At Harvard, I direct the REACT Lab (Robotics, Embedded Autonomy, and Communication Theory Lab). My goal is to develop and use technologies for improving robot-robot and human-robot teamwork. The key to effective coordination is information exchange. So my research looks at ways that use wireless signals to improve communication in multi-robot teams, enhance situational awareness, and secure core multi-agent algorithms. My work has also studied the potential of using brain signals for information exchange in human-robot teams. I am interested in applications of my research to positioning systems indoors, human-robot collaboration, and making robot-robot teams robust and secure against cybersecurity threats.
Most generally, my work centers around trust and coordination in multi-robot systems. I have been granted an NSF CAREER award (2019), the ONR Young Investigators (YIP) award (2021), and have been selected as a 2020 Sloan Research Fellow. I have also held a Visiting Assistant Professorship at Stanford University (2019) where I was working with the Stanford Robotics Lab. Please see links to our work that has been reviewed in MIT News, as well as several other news outlets including Wired and the Forbes!
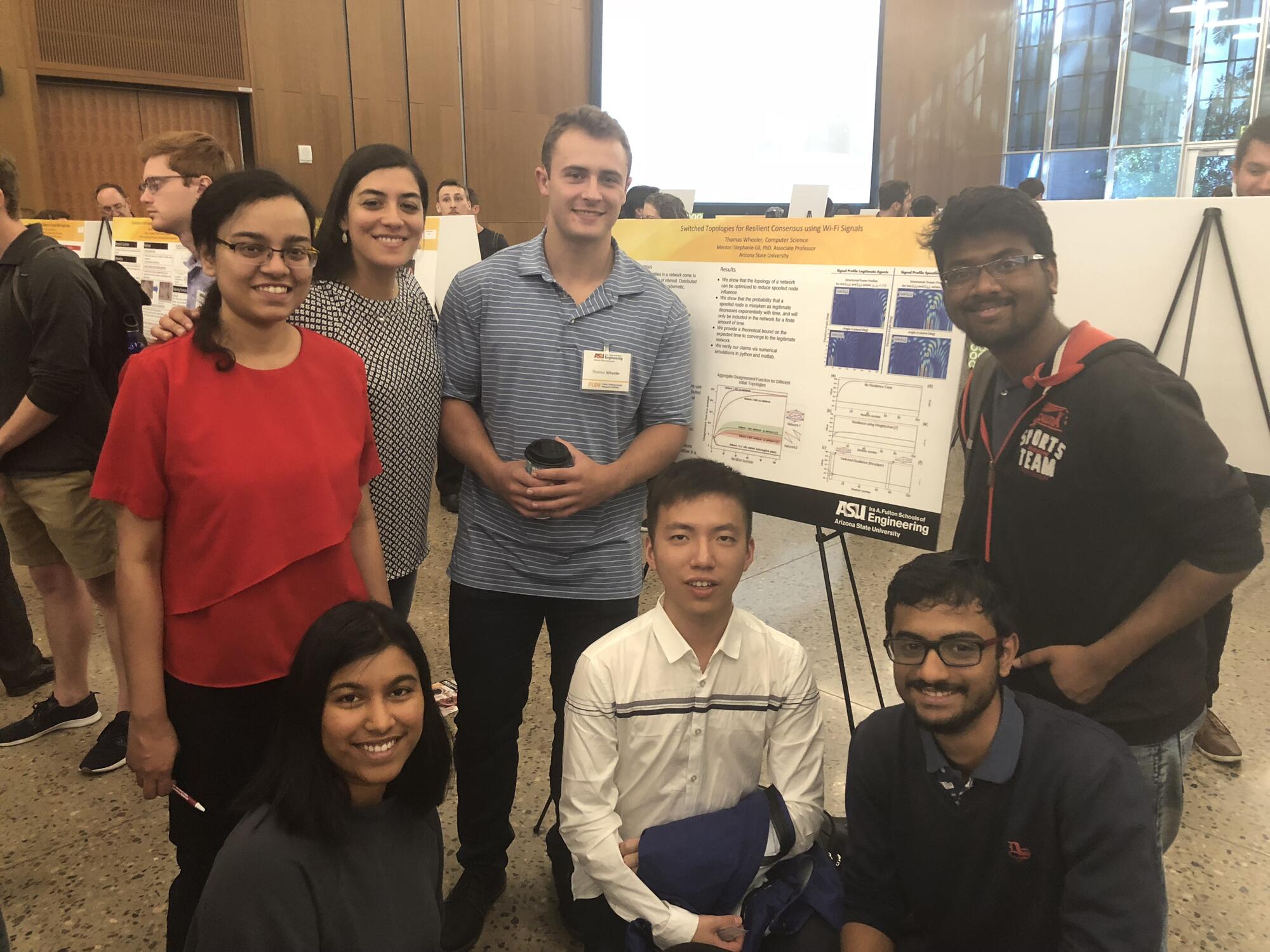
Our REACT Lab (Robotics, Embedded Autonomy, and Communication Theory Lab) group photo:
 Our REACT Lab heterogeneous air/ground testbed where we do fast algorithm prototyping and testing for multi-robot decision making and control:
Our REACT Lab heterogeneous air/ground testbed where we do fast algorithm prototyping and testing for multi-robot decision making and control:
 Our students learn to control robots, track them using our new motion capture lab, and program them to work collaboratively using communication as a sensor for intelligent decision-making.
Our students learn to control robots, track them using our new motion capture lab, and program them to work collaboratively using communication as a sensor for intelligent decision-making.

We are always looking for talented and motivated PhD, M.S., and B.S. students to join our team. Email sgil@asu.edu with your CV and list of relevant current and past projects!
Recent News
- I was recently selected as a 2020 Sloan Research Fellow for my work in robotics and communication
- Our paper on distributed learning for POMDP in a sequential repair setting with Dimitri Bertsekas has been accepted for publication in RAL 2020!
- Our paper on active rendezvous and outlier detection in multi-robot mapping is accepted to ISRR 2019!
- Visiting assistant professorship at Stanford University with Oussama Khatib for summer 2019
- Our paper “Switching Topology for Resilient Consensus using Wi-Fi Signals” gets accepted to ICRA 2019!
- REACT Lab presents new work on sequential decision making for POMDP at the MIT Learning for Decision and Control workshop in May 2019
- I have been granted the NSF CAREER 2019 award for my work in multi-robot coordination and distributed decision making
- Our paper “Resilient Multi-Agent Consensus Using Wi-Fi Signals” gets accepted to IEEE Control Systems Letters (L-CSS) 2018!
- Our paper “Plug-and-play supervisory control using muscle and brain signals for real-time gesture and error detection” gets accepted to RSS 2018!
- Huffington Post - This Mind-Controlled Robot Corrects Its Mistakes When It Senses It's Done Wrong
- Newsweek - Mind-Controlled Robots Make Machines 'Natural Extension of Us'
- Forbes: Robot Makes Mistake, Human Notices And Does Nothing, Robot Responds And Corrects Mistake